创新驱动智能网联汽车三维建模 —— 便携式激光SLAM扫描仪研发成果发布
引行智驾科技有限公司 · 慧影智测团队 2026年5月28日
为推进智能网联汽车三维空间建模技术创新与应用,引行智驾科技有限公司慧影智测团队正式发布便携式激光SLAM扫描仪研发成果。该扫描仪搭载海康威视STI-HSIR110系列三维激光扫描成像雷达,结合团队自主研发的三项创新技术,解决了便携供电、数据完整性和工作模式灵活性三大痛点。

▲ 便携式激光SLAM扫描仪设备实景
一、三大创新技术突破
创新点1:充电宝供电与电源热切换,支持航空高铁携带
电源管理模块包含双路移动电源输入、电压监测、切换控制及缓冲储能单元,当主路电压低于阈值时无缝切换至备用回路,单路耗尽可随时拔换。无内置锂电池,可直接登机或乘高铁,确保野外长时间建图连续进行。
创新点2:CPU性能受限下保证数据完整性与不丢失
系统包含数据采集、环形缓冲缓存、数据校验及非易失存储模块。车载边缘计算算力被抢占时,点云与位姿数据先完整缓存再低速写入,缓冲区溢出时自动触发降采样或暂停,确保零丢帧、零错序。
创新点3:纯激光/激光-图像联合双模式切换
纯激光模式下图像模块休眠,仅输出点云,适用高速移动轻量建图;联合模式下同步采集纹理与点云,生成彩色三维地图。无需重启即可切换,灵活适配不同场景。
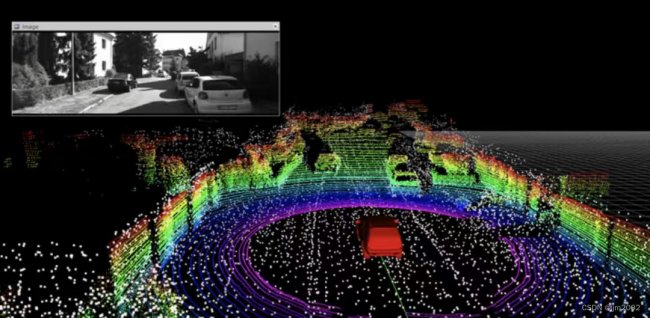
▲ 城郊街道场景实景与激光点云建图对比效果
二、应用前景
该扫描仪可广泛应用于智能网联汽车道路环境三维建模、自动驾驶高精地图构建、智慧交通场景感知、地下空间与封闭场所建图等领域。慧影智测团队将继续围绕车载边缘计算与三维建图融合方向深入研发,推动智能网联汽车感知能力持续进化。
本次成果发布既是回顾过往、展示实力的总结会,也是凝聚共识、展望未来的动员会。团队将坚守创新初心,勇担时代使命,以更昂扬的斗志、更扎实的作风,共同谱写智能网联汽车技术发展的新篇章。
图/文 引行智驾科技有限公司 慧影智测团队
免责声明:市场有风险,选择需谨慎!此文仅供参考,不作买卖依据。
为您推荐:
立夏贪凉、小满湿重,胃肠疾病高发!真实案例告诉你:胃肠镜,不是 “受罪”,是 “保命”
珠宝定制什么品牌好?从证书体系到售后保障,四大定制钻戒横评
博银合创推进工业具身智能进入真实工厂,加速落地交付
立夏湿热困脾胃,一场无痛胃肠镜,把 “不安” 变成 “心安”
华善社完善儿童公益服务机制 让每一次帮扶都有记录有回响
Omdia:2026Q1欧洲智能手机市场增长2%,平均售价创历史新高
4000最值得买的手机推荐 参数党首选荣耀600 Pro
4000左右拍照好看的手机推荐 荣耀600 Pro打造2026人像标杆
预算3000左右的手机推荐 2026荣耀600堪称均衡旗舰